First UAV Build:
Component Selection

Selecting the components from scratch for the first ever drone I built: a 250mm motor-to-motor quadcopter.
Building a quadcopter from scratch — from Newtonian mechanics to first real flight.
Selecting the components from scratch for the first ever drone I built: a 250mm motor-to-motor quadcopter.

Practical assembly of the various components of the QAV250 drone
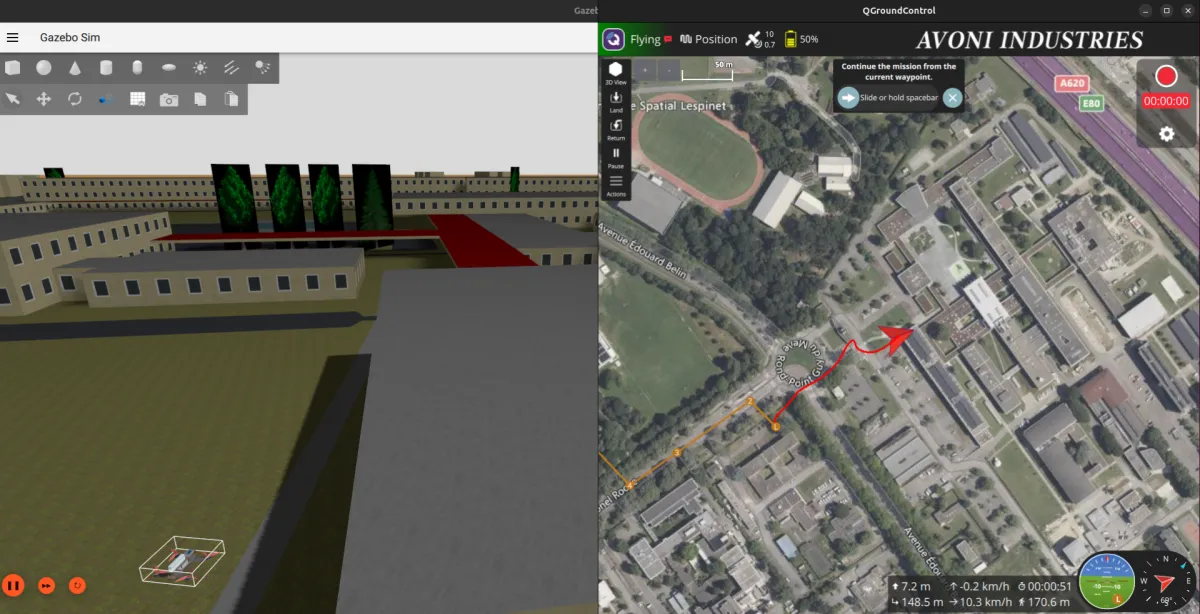
Specifics of the softwares -like QGroundControl, Gazebo and PX4_SITL- used to run SITL simulation for the quadcopter

Real drone software and subsequent real drone flight!